Лекция 9. Основы робототехники: сенсорно-исполнительная структура и кейсы применения вне ИТ
Цель
лекции:
Изучить принципы построения робототехнических систем через призму
сенсорно-исполнительной структуры (архитектуры обратной связи), рассмотреть
назначение основных типов датчиков и контроллеров, а также проанализировать
практические кейсы внедрения автономных роботов и дронов в традиционных (не-ИТ)
отраслях экономики.
1. Введение: Что делает
машину роботом?
В обществе существует стереотип,
что робот — это обязательно человекоподобный андроид из фантастических фильмов.
В инженерии определение гораздо прозаичнее.
·
Робот — это автономное устройство,
предназначенное для автоматического выполнения физических операций, которое
воспринимает окружающий мир, принимает решения и воздействует на этот
мир.
·
Главное отличие от обычного
автомата: Стиральная машина выполняет
жесткую программу по таймеру (это автомат). Робот-пылесос адаптирует свой
маршрут на основе того, встретил ли он препятствие, изменилось ли покрытие и где
находится зарядная станция.
·
Робототехника — это точка слияния
трех ИТ-компонентов: Data (данные от датчиков) à Intelligence
(алгоритмы ИИ/контроллеры) à Action (физическое
действие).
2.
Сенсорно-исполнительная структура: Петля обратной
связи
Любая роботизированная система, от
беспилотного дрона до автоматизированной заводской линии, строится по единой
кибернетической схеме: «Восприятие à Мышление
à
Действие».
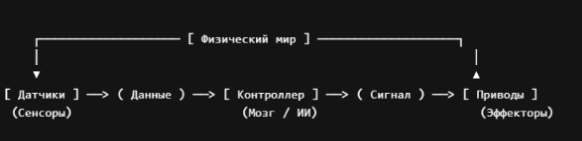
1. Сенсорная система
(Датчики / Сенсоры)
Это «органы чувств» робота. Они
переводят физические величины реального мира (температуру, расстояние, свет,
давление) в электрические сигналы, понятные
микропроцессору.
·
Ультразвуковые и инфракрасные
датчики: Измеряют расстояние до объектов
(принцип эхолокации).
·
Энкодеры: Датчики на колесах или
суставах робота, которые точно измеряют угол поворота и
скорость.
·
IMU-модули (инерциальные
датчики): Акселерометры и гироскопы, которые
определяют положение робота в пространстве, наклон и ускорение (критически важны
для квадрокоптеров).
·
Лидары (LiDAR) и
CV-камеры: Датчики сложного трехмерного
зрения, строящие цифровую карту пространства вокруг
робота.
2. Управляющая система
(Вычислительный контроллер)
Это «мозг» робота. Микроконтроллеры
(например, архитектуры общего назначения или специализированные промышленные
платы) принимают данные от датчиков, обрабатывают их по заложенным алгоритмам
(или с помощью встроенных нейросетей) и принимают решение, какое действие
совершить.
3. Исполнительная
система (Приводы / Эффекторы)
Это «мышцы» робота, которые
совершают полезную физическую работу.
·
Электродвигатели и
сервоприводы: Точно поворачивают оси робота на
заданный угол.
·
Гидравлические и пневматические
системы: Используют давление жидкостей или
воздуха для перемещения тяжелых грузов (в тяжелой технике и
манипуляторах).
·
Схваты (грипперы): Механические пальцы,
магнитные или вакуумные присоски для удержания предметов.
Понятие обратной связи
(Feedback Loop): Робот подает команду на двигатель
à датчик (энкодер)
проверяет, насколько повернулось колесо à если колесо забуксовало
на льду или грязи, контроллер мгновенно корректирует мощность. Робот постоянно
сверяет план с физической реальностью.
3. Применение
робототехники вне ИТ-сферы
Наибольший экономический эффект
роботизация приносит в традиционных секторах, где процессы связаны с тяжелым
трудом, монотонностью или опасностью для жизни.
1. Сельское хозяйство
(Агроробототехника)
·
Автономные тракторы и
комбайны: Используя спутниковую навигацию
(RTK-GPS) и компьютерное зрение, техника обрабатывает поля с точностью до
сантиметра без участия водителя, работая круглосуточно.
·
Дроны для ультраобъемного
опрыскивания: Мультикоптеры точечно распыляют
удобрения или пестициды строго на те участки поля, где ИИ обнаружил сорняки или
болезни, экономя до 50% химикатов.
·
Роботы-дояры на
фермах:
Полностью автономные станции, которые с помощью лазерных датчиков находят вымя
коровы, проводят гигиеническую обработку и осуществляют доение, попутно
анализируя качество молока.
2. Энергетика и
промышленный мониторинг
·
Инспекция линий электропередач
(ЛЭП):
Беспилотные летательные аппараты (БПЛА) летают вдоль высоковольтных линий,
сканируют их тепловизорами и лидарами, обнаруживая провисания проводов или
опасное приближение веток деревьев без риска для жизни
монтеров.
·
Обследование закрытых
пространств: Роботы на гусеничном ходу или
магнитные колесные платформы проникают внутрь нефтепроводов или цистерн для
поиска микротрещин методами ультразвукового контроля.
3. Строительство и
архитектура
·
3D-печать зданий: Промышленные
строительные принтеры (гигантские портальные роботы) послойно выдавливают
специальный бетонный раствор, возводя каркасы домов за считанные дни с
минимальным количеством строительных отходов.
·
Лазерное сканирование
площадок: Автономные шагающие роботы
(например, робособаки) каждую ночь обходят строящийся объект, сканируя его
лидаром, чтобы автоматически сверить фактический объем выполненных работ с
цифровым чертежом (BIM-моделью).
4. Логистика и складское
хозяйство
·
Склады без людей
(AGV-роботы): Компактные плоские
роботы-платформы заезжают под стеллажи с товарами, приподнимают их и сами
привозят к человеку-сборщику. Человек не ходит по складу — склад сам движется к
нему.
4. Заключение и барьеры
роботизации
Роботизация меняет структуру рынка
труда: исчезает спрос на низкоквалифицированный, опасный и рутинный труд (так
называемый «3D-труд»: Dull, Dirty, Dangerous — скучный, грязный,
опасный).
Однако на пути к тотальной
автоматизации стоят серьезные инженерные вызовы:
1.
Энергоэффективность: Время автономной работы
большинства современных дронов и мобильных роботов все еще ограничено емкостью
аккумуляторов (обычно от 30 минут до нескольких часов).
2.
Законодательные
барьеры: Кто несет юридическую
ответственность, если полностью автономный трактор на поле или дрон-доставщик
причинит материальный ущерб? Этот правовой вакуум только начинает заполняться
международными стандартами.
Вопросы
1.
Представьте автоматическую систему
полива комнатных растений. Опишите ее сенсорно-исполнительную структуру: что в
ней будет датчиком, что — контроллером, а что —
исполнителем?
2.
В каком секторе вашей будущей
специальности автоматизация физических процессов принесет наибольшую пользу, и
какие рутинные задачи она сможет забрать у человека?